
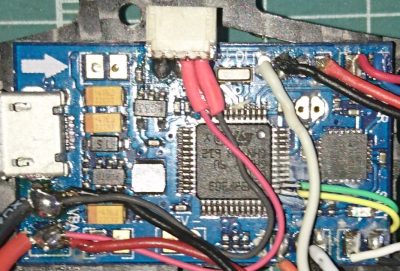
大きさ10cmの小型マルチコプターEachineのEX100ですが、ご存じの通り標準ではGPSモジュールも載ってなく、接続するポートもございません。唯一基板上に外部接続できそうな端子が

この裏にTXとRXのプリントがされている上の写真赤丸部にあるランドなのですが、パターンを追いかけるとSTM32の43(PA10)と42(PA9)にRX、TXが接続されおり、調べるとこのIOはUART1でEX100のF3_EVO_Brush Flight controllerをCLEANFLIGHT等で接続する為のUSBポートとして既に使用されているポートである事が判りました。
このままではOP-GPSを接続する事はできません。
せっかくSPRacingF3と同じファームで動いているのでポートさえあれば・・・ なのですが
そこで、SPRacingF3のUART2がSTM32の何処に接続されているパターンを見ると50(PA15)、49(PA14)にそれぞれRX、TXが接続されおり、F3_EVO_Brush Flight controllerのSTM32では目視できませんがおそらく何処にも接続されていないと思われ、基盤のパターン変更で接続できるように改造してみようと思いました。
OP-GPSには既に1mmピッチのJSTハウジングが付いておりますので、脱着の事を考えると直半田付けは避けコネクターをF3_EVO_Brush Flight controllerに取り付ける必要があります。問題はその場所なのですが、これだけ小型化された基板にそのスペースは無くやはり既に用意されているUART1のRX、TXを利用してコネクターのピンを半田付けした方が強度的に言っても良いでしょう。(どうせUSBで使用されているポートなのであっても意味無いので)
さて、取り付け方法が決まりましたので部品の準備です。OP-GPSのコネクターピンアサインは
Black to GND
Red to +5V
Blue to TX
Orange to RX
なので、TX、RXは基板に半田付けするとして電源とグランドはワイヤーで接続する必要があります。
これが1mmピッチのJSTコネクターですが、
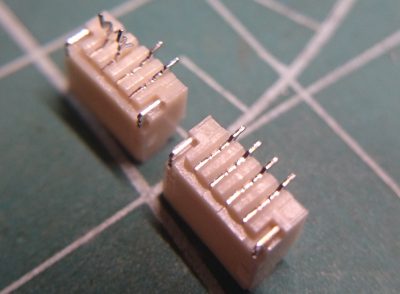 左上の様にピンを立て
左上の様にピンを立て
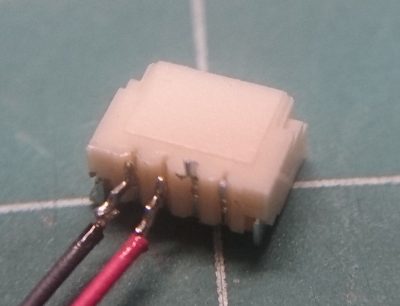
ワイヤーを半田付け
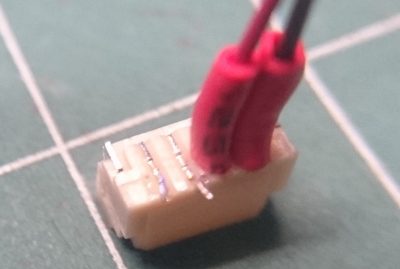
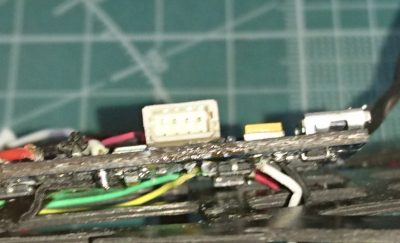
熱収縮チューブで覆い、TXとRX側は少々広げ
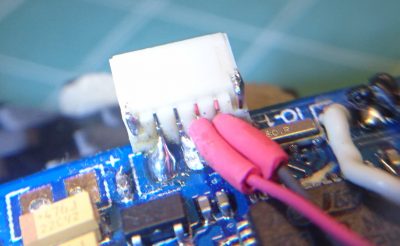
基板に半田付け
電源はバッテリーラインに直付けしました。
これで、OP-GPSのコネクターが挿さる様になりましたが、これではUART1ポートに繋がっておりますので、パターン変更をしないといけません。
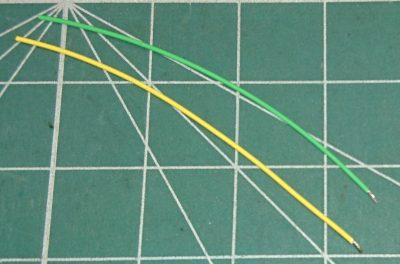 用意したのはAWG32のワイヤー
用意したのはAWG32のワイヤー
被覆をむきヨリ線を束ね半田付けしておきます。

STM32のピンに合わせマスキングテープ等で固定します。
ここをルーペで見ながら半田鏝を当ててワイヤーに付いた半田を溶かしてくっ付けます。

ここまでできたら実際に動作するか確認しておきます。STM32に半田付けしたワイヤーの反対側被覆をむき、OP-GPSのコネクターハウジングから外したピンに直接挿し込んでCLEANFLIGHTで動作確認します。ここでのCLEANFLIGHT設定画面は割愛しますが、先日投稿したSPRacingF3と同じ設定で動作する事が確認できました。
動作確認もOKなので基板のパターン変更を行います。

仮止めしていたマスキングテープを剥がし耐衝撃性を上げるために瞬間接着剤をたらします。

固まるとこんな感じ

カッターでパターンカットをしてワイヤーをSTM32実装面から裏面に回して半田付けすれば完了
表と
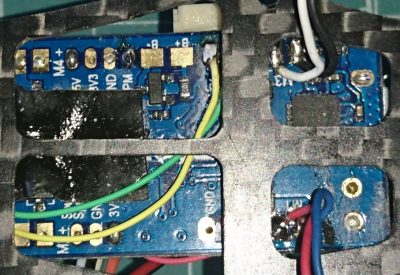
裏はこんな感じ
一応コネクターがピン2本でしか止まっていないので、こちらも瞬接を垂らしておきました。