
前回Eachine EX100にGWSの72Mhz受信機を載せましたので、今回はその設定編です。
ポイントは下記3点です。
①レシーバー設定はPPM
②モーター設定はBRUSHED
③チャンネルマップはAETR1234
基本的にデフォルトから上記3つを設定すればフライト可能になります。
注意:設定は必ずモーターからプロペラを外した状態で行いましょう。
それではCleanflightを起動します。
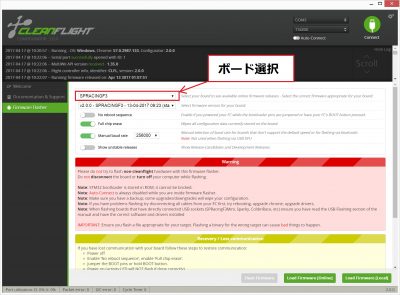
まずファームですが、このEachine EX100は「SPRACINGF3」で設定可能になります。ネット上の商品説明欄にはEVOと書かれておりこのボード選択で「SPRACINGF3EVO」を選択してフラッシュすると、それ以降Cleanflightで接続できなくなってしまいましたので、「SPRACINGF3」を使用した方が良いと思います。
続いて設定関連ですが、上の画面より右上の丸いCONNECTボタンをクリックすると下記画面になります。
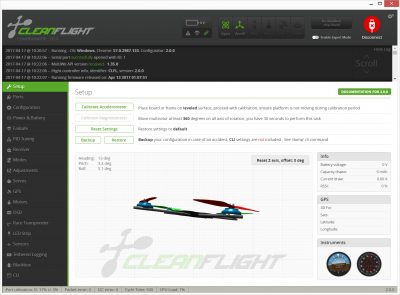 このSetup画面ではジャイロのキャリブレーションが行えますが機体とボードが水平に装着されているのであれば特に行う必要はないと思います。
このSetup画面ではジャイロのキャリブレーションが行えますが機体とボードが水平に装着されているのであれば特に行う必要はないと思います。
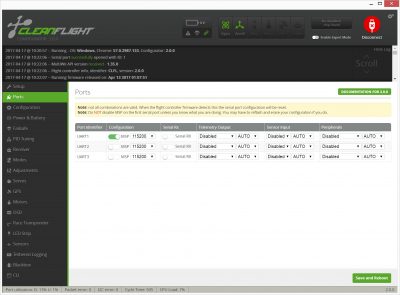
次はPorts(ポート)ですが、こちらもデフォルトでOKです。UART1ポートのみMSP設定されていれば問題ありません。
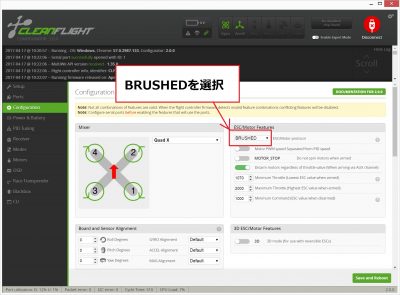
次にConfiguration(コンフィグ)ですがESC/Motir Featuresのプロトコル欄がデフォルトでは「ONESHOT125」になっていますので、「BRUSHED」に変更します。続いて画面を下までスクロールさせReceiver欄のモード設定を「PPM RX input」にします。
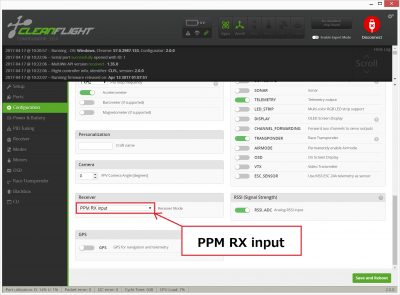
この画面での設定は終わりです。忘れずに画面右下の「Save and Reboot」をクリックしましょう。
最後にReceiver画面ですが、Channel Map欄をプロポに合わせて設定します。私の場合はフタバのプロポですので、「TAER1234」を選択しました。
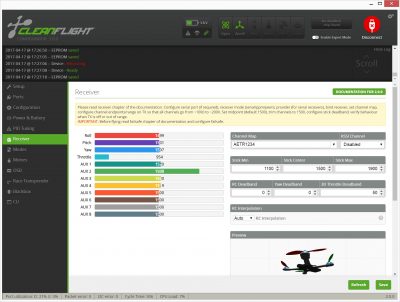
上記画面はプロポの設定は終了していて電波が送信されている状態なのですが、各チャンネルモニター(画面左側の棒グラフ)PPM信号を拾ってリアルタイムに値表示されております。
棒グラフで表示されている各チャンネルについて簡単に説明しますと
上から
Roll(ロール)
シングルローターのヘリで言うと「エルロン」で左右横方向の動き(傾き)になり、SPRACINGF3では1チャンネルに割り当てられています。
Pitch(ピッチ)
「エレベータ」で前後縦方向の動き(傾き)になります。チャンネルは2
Yaw(ヨー)
「ラダー」です。機体を左右に向けます。(首ふり)チャンネルは4チャンネル(なぜか表示順がスロットルと逆になっている。)
Throttle(スロットル)
そのまま「スロットル」です。機体が水平状態であれば上下に移動します。3チャンネルです。(なぜか表示順がヨーと逆になっている。)
以下AUXですが、必要に応じて機能を割り当ててください。チャンネルはAUX1が5ch、AUX2が6chと順番に割り当てられています。
ここまで、プロポの設定とCleanflightの表示があっていれば画面右下のPreviewで機体の3D-CGを正確にコントロールする事ができると思います。
基本設定はこれで完了です。画面右下の「save」をクリックして、画面右上の赤丸Disconnectをクリックし、機体をUSBケーブルから外してください。
フライト(その前に)
さて、これでEachine EX100を飛ばす準備ができた訳ですが、機体にバッテリーを接続していざプロポのスロットルを上げてもモーターは回りません。私も知らなかったのですがモーターをアイドル状態にすることを「アーム」と云うそうで、SPRACINGF3をアームにするには
「スロットルを最少にしてラダーを最大(右)にする。」
はい、これでモーターが回りスロットルを上げると回転数も増すと思います。
モーターを止めるには
「スロットルを最少にしてラダーを最小(左)にする。」
いかがでしょうか、各チャンネルの動きに伴いモーターの回転数も変化していれば、問題ないと思いますのでプロペラを装着してフライトさせてみてください。
以上 ではまた。